

ปัจจุบันการใช้งานหุ่นยนต์มีแนวโน้มที่จะเข้ามาอยู่ในภาคครัวเรือนมากขึ้น ทำให้หุ่นยนต์กลายมาเป็นส่วนหนึ่งของชีวิตมนุษย์ ไม่ว่าจะเป็นหุ่นยนต์ดูดฝุ่น ขัดห้องน้ำ หรือเช็ดกระจก เพื่อตอบสนองวิถีชีวิตของมนุษย์ที่เปลี่ยนไป มนุษย์ต้องทำงานและอยู่ตัวคนเดียวมากขึ้น ดังนั้นหุ่นยนต์ใช้งานในบ้านหรือหุ่นยนต์แม่บ้านนั้นเป็นหัวข้อที่เติบโต และเป็นทิศทางหลักของการวิจัยและพัฒนาหุ่นยนต์ในอนาคต การพัฒนาหุ่นยนต์ใช้งานภายในบ้านมีการวิจัยและพัฒนาอย่างต่อเนื่องเป็นเวลาหลายสิบปีจากหลากหลายประเทศ เช่น ญี่ปุ่น เยอรมนี และหลายประเทศที่เป็นประเทศสังคมผู้สูงอายุ เพื่อลดการขาดแคลนบุคลากรของประเทศ แต่การพัฒนานั้นเป็นไปได้ช้า เนื่องจากการที่หุ่นยนต์จะสามารถใช้งานภายในบ้านและทำงานได้จริงนั้น จำเป็นต้องมีองค์ประกอบหลายๆ อย่างด้วยกัน

ความสามารถพื้นฐานของหุ่นยนต์ที่จะต้องมีในขณะที่ทำงานภายในบ้านแบบอัตโนมัติ คือความสามารถพื้นฐานของมนุษย์อันประกอบด้วย 1.ความสามารถในการมองเห็น 2.ความสามารถในการได้ยิน 3.ความสามารถในการสื่อสาร 4.ความสามารถในการหยิบจับและสัมผัส 5.ความสามารถในการเรียนรู้สภาพแวดล้อม การสร้างแผนที่และการเคลื่อนที่ไปยังตำแหน่งที่ต้องการ และ 6.ความสามารถในการเรียนรู้วิเคราะห์ เข้าใจ จดจำ และแยกแยะ (ปัญญาประดิษฐ์) หรืออาจจะเรียกง่ายๆ ว่าสมองของหุ่นยนต์ นอกจากความสามารถทั้ง 6 นี้แล้ว หุ่นยนต์ภายในบ้านต้องมีความปลอดภัยที่สูงสุดเนื่องจากมีปฏิสัมพันธ์กับมนุษย์โดยตรง
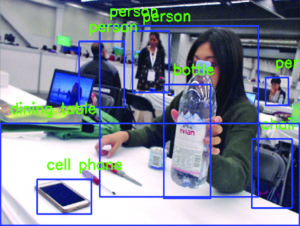
ความสามารถในการมองเห็นของหุ่นยนต์จะเกิดจากการใช้กล้องทั้งแบบสองมิติและสามมิติมองไปยังสิ่งของหรือมนุษย์ ความสามารถในการได้ยินนั้นเกิดจากการเก็บเสียงผ่านไมโครโฟน ความสามารถในการสื่อสารนั้นอาจจะใช้ลำโพงเพื่อสร้างเสียงในการตอบโต้หรือแสดงผลออกทางหน้าจอให้ผู้ใช้งานเห็นก็ได้ แขนของหุ่นยนต์ที่ควบคุมการเคลื่อนไหวด้วยมอเตอร์ทางไฟฟ้านั้นจะถูกใช้งานเพื่อหยิบและจับสิ่งของต่างๆ และใช้เซ็นเซอร์วัดแรงทำการตรวจจับแรงสัมผัส ความสามารถในการเรียนรู้สภาพแวดล้อมนั้นเป็นหัวใจหลักของการทำให้หุ่นยนต์สามารถเคลื่อนที่ไปยังตำแหน่งที่ต้องการได้ โดยหลักการนั้นใช้วิธีเดียวกันกับการเรียนรู้สภาพแวดล้อมของมนุษย์ เช่น การที่มนุษย์ไปยังสถานที่ใหม่ๆ ที่ไม่เคยไป อย่างแรกที่มนุษย์จะทำคือการมองไปรอบๆ เพื่อหาจุดสนใจ (Landmarks) และทำการสร้างแผนที่ของสถานที่นั้นๆ ไปเรื่อยๆ ขณะเดินสำรวจสถานที่ และในที่สุดจะได้แผนที่ที่มีจุดสนใจขึ้นมาในสมองของมนุษย์ หลังจากนั้นถ้าต้องการเดินไปยังสถานที่ใด มนุษย์ก็สามารถทำได้ทันที จากข้อมูลที่อยู่ในสมองหุ่นยนต์ที่มีความสามารถนี้ก็
สามารถทำได้เช่นเดียวกัน ลักษณะของการทำงานสร้างแผนที่พร้อมทำการสำรวจสถานที่จะเรียกว่า Simultaneous Localization And Mapping (SLAM) ส่วนสุดท้ายที่สำคัญที่สุดของหุ่นยนต์ คือสมองหรือปัญญาประดิษฐ์ เป็นส่วนที่รับข้อมูลการมองเห็น การได้ยิน การสร้างการตอบโต้ การเคลื่อนไหวของแขน การรับรู้ การสัมผัส รวมไปถึงการเคลื่อนที่ของหุ่นยนต์แล้วนำมาเรียนรู้วิเคราะห์ เข้าใจ จดจำ และแยกแยะ เพื่อให้หุ่นยนต์สามารถปฏิบัติงานในงานที่มีความซับซ้อนได้
ในอดีตนักวิจัยความฉลาดและปัญญาประดิษฐ์ของหุ่นยนต์เน้นการสร้างอัลกอริทึม (Algorithm) ในการทำให้หุ่นยนต์มีความฉลาดและตัดสินใจได้ แต่วิธีการเหล่านี้กลับมีข้อจำกัดจากการที่มนุษย์ไม่สามารถนำความรู้ความฉลาดและประสบการณ์ของมนุษย์ใส่ลงในสมองหุ่นยนต์ได้ทั้งหมด ทำให้หุ่นยนต์สามารถทำงานได้เฉพาะงานง่ายๆ เท่านั้น ดังนั้นการจะทำให้หุ่นยนต์ฉลาดจำเป็นต้องอาศัยการจำลองโครงสร้างสมองและโครงข่ายประสาทของมนุษย์ให้กลายเป็นโครงข่ายประสาทเทียมแบบลึกซึ้งของสมองหุ่นยนต์ (Deep Artificial Neuron Networks) และใช้วิธีการสอนให้หุ่นยนต์เรียนรู้ (Machine Learning) จึงจะทำให้หุ่นยนต์สามารถเรียนรู้วิเคราะห์ เข้าใจ จดจำ และแยกแยะในงานที่ซับซ้อนได้ ยกตัวอย่างเช่น การจดจำใบหน้า การแยกแยะเพศ การประมาณอายุ การหาสิ่งของหลายๆ สิ่งภายในสภาพแวดล้อมที่ต่างกัน ความสามารถในการเข้าใจภาษาของมนุษย์ ความสามารถในการค้นหาคำตอบ และความสามารถในการเรียนรู้เพิ่มเติม
เนื่องจากการพัฒนาหุ่นยนต์ใช้งานภายในบ้านนั้นมีความซับซ้อน ต้องทำงานแบบอัตโนมัติและใช้เทคโนโลยีชั้นสูง ดังนั้นในปี พ.ศ.2551 (2008) การแข่งขันหุ่นยนต์แม่บ้านได้ถูกจัดขึ้นเป็นครั้งแรกในชื่อการแข่งขัน World RoboCup @Home เพื่อทำการสนับสนุนการพัฒนาหุ่นยนต์ภายในบ้าน โดยให้ทีมวิจัยจากประเทศต่างๆ มาร่วมแข่งขันเพื่อแก้ปัญหาต่างๆ ภายในบ้าน เช่น การเก็บกวาดบ้าน การจดจำใบหน้าของผู้อยู่อาศัย การสั่งงานหุ่นยนต์ด้วยเสียง การสั่งงานหุ่นยนต์ด้วยท่าทาง (ภาษามือ) การให้หุ่นยนต์เดินไปหยิบของจากห้องต่างๆ การให้หุ่นยนต์เดินตามคนสั่งไปช่วยถือของและกลับมาวางยังจุดต่างๆ ภายในบ้านแบบอัตโนมัติ
นอกจากนั้นแล้วในการแข่งขันยังเปิดโอกาสให้ทีมนักวิจัยได้เสนอผลงานเชิงวิชาการในการนำเสนอการใช้หุ่นยนต์ภายในบ้านในลักษณะที่นักวิจัยสนใจ เช่น การใช้งานหุ่นยนต์มากกว่า 1 ตัวในการทำงานร่วมกัน และการให้หุ่นยนต์ทำอาหารให้มนุษย์ ซึ่งประเทศญี่ปุ่นและเยอรมนีได้แสดงผลงานได้อย่างยอดเยี่ยมในทุกๆ การแข่งขัน