

รศ.นท.ดร.นพ.สรยุทธ ชำนาญเวช ประสาทศัลยแพทย์ สาขาวิชาประสาทศัลยศาสตร์
รองหัวหน้าภาควิชาศัลยศาสตร์ ภาควิชาศัลยศาสตร์
คณะแพทยศาสตร์โรงพยาบาลรามาธิบดี มหาวิทยาลัยมหิดล
มนุษย์พัฒนาโลกที่อาศัยอยู่ด้วยสติปัญญาที่ยอดเยี่ยมและมีประสิทธิภาพ สามารถประยุกต์วิธีการแก้ปัญหาสุขภาพให้ดีขึ้นด้วยวิทยาศาสตร์และวิศวกรรมชีวการแพทย์ในช่วงสองถึงสามทศวรรษที่ผ่านมา ทำให้อายุขัยของมนุษย์เรายืนยาวขึ้นอย่างชัดเจนหากเปรียบเทียบจากอดีต [1,2] แต่ด้วยข้อจำกัดบางประการของมนุษย์ โดยเฉพาะจิตใจ สรีรวิทยา และร่างกายเป็นปัจจัยที่ทำให้มนุษย์ยังคงโอกาสทำให้เกิดความผิดพลาด คลาดเคลื่อน ไม่สามารถทำให้เกิดความถูกต้อง แม่นยำ และมีความรวดเร็วอย่างสม่ำเสมอ ดังนั้นมนุษย์เราจึงมาถึงขั้นที่ต้องการการปรับปรุง นอกเหนือจากความสามารถทางร่างกายและจิตใจของมนุษย์เรา ดังนั้นอุปกรณ์ทางวิทยาศาสตร์และวิศวกรรมศาสตร์ที่นำมาใช้สำหรับสนับสนุนเพื่อแก้ไขความผิดพลาด คลาดเคลื่อน กำลังถูกคิดค้นและพัฒนาเพื่อเอาชนะข้อจำกัดเหล่านี้ การประยุกต์ใช้คอมพิวเตอร์ที่จัดทำขึ้นตามการเขียนคำสั่งการที่เป็นระบบนั้นมีมานานนับหลายทศวรรษ และเป็นที่มาของวิทยาการหุ่นยนต์ที่แตกต่างกันหลากหลายชนิด เพื่อเปลี่ยนโลกและการรับรู้ของมนุษย์ในการแก้ปัญหาสุขภาพ วิทยาการหุ่นยนต์นี้ได้นำเสนอวิธีการและเครื่องมือที่เกินขอบเขตของจินตนาการ หรือนิยายวิทยาศาสตร์ให้กลายเป็นความจริง และเป็นประโยชน์อย่างมากต่อมนุษย์สำหรับการใช้งานเพื่อการผ่าตัดรักษาโรคที่มีความแม่นยำ[3] ศักยภาพของการใช้งานหุ่นยนต์ในลักษณะที่สามารถตอบสนองต่อการสั่งการได้ทันทีนั้นไม่จำกัด และสามารถเปลี่ยนแปลงให้เราได้เห็นหุ่นยนต์ช่วยผ่าตัดที่ใช้งานได้จริง แม่นยำ และมีความปลอดภัยในระหว่างการผ่าตัดในทุกวันนี้ และตั้งแต่ศตวรรษที่ 20 ที่ผ่านมาเป็นที่น่าสนใจอย่างยิ่ง โดยเฉพาะหุ่นยนต์ได้กลายเป็นส่วนหนึ่งของทั้งอุตสาหกรรมหนักและในขั้นตอนการผ่าตัดที่แม่นยำเพื่อช่วยรักษาชีวิตมนุษย์
สำหรับศตวรรษที่ 21 นี้ การประยุกต์ใช้หุ่นยนต์เพิ่มขึ้นเนื่องจากความสะดวกของการใช้งาน การลดความเสี่ยง ลดเวลาในการผลิต สามารถทำงานให้เสร็จสิ้นด้วยระบบอัตโนมัติที่ได้รับการปรับปรุง มีความแม่นยำที่ดีขึ้น และมีความสามารถหลีกเลี่ยงทำอันตรายต่อมนุษย์ ลดข้อผิดพลาดคลาดเคลื่อนของมนุษย์ มีการพัฒนาระบบปัญญาประดิษฐ์ ทำให้สามารถช่วยส่งเสริมความน่าเชื่อถือของการทำงานของหุ่นยนต์[4] ในอุตสาหกรรม 4.0 มีการบูรณาการและประยุกต์ใช้ข้อมูลดิจิทัล ข้อมูลกายภาพและอิเล็กทรอนิกส์ ก่อให้เกิดประโยชน์ต่อชีวิตมนุษย์ การประยุกต์ใช้หุ่นยนต์มีประสิทธิภาพและความเร็วสูงขึ้น อีกทั้งยังมีการจัดการข้อมูลดิจิทัลเป็นส่วนสำคัญของอุตสาหกรรมนี้ [5] ในทำนองเดียวกัน ปัญญาประดิษฐ์ก็มีบทบาทอย่างมากต่อการพัฒนาการด้านการแพทย์ในยุคอุตสาหกรรม 4.0 [6] การพัฒนาที่โดดเด่นในเทคโนโลยีเซ็นเซอร์ขั้นสูง การขยายการใช้งานของปัญญาประดิษฐ์ (AI) การพัฒนาของระบบอินเทอร์เน็ตของหุ่นยนต์ (IoRT) การใช้งานหุ่นยนต์บนคลาวด์ที่เพิ่มขึ้น[6] จำนวนการใช้งานหุ่นยนต์ที่เพิ่มขึ้นในบริบททางอุตสาหกรรมต่าง ๆ ทำให้เกิดการพัฒนาระบบการทำงานร่วมกันมนุษย์และหุ่นยนต์ในลักษณะร่วมมือทำงาน หรือ cobot
การผ่าตัดรักษาโรคถือเป็นหนึ่งในความรับผิดชอบที่สำคัญที่สุด เพราะศัลยแพทย์ต้องทำการผ่าตัดด้วยความถูกต้อง แม่นยำ ที่สำคัญคือการฝึกอบรมวิชาชีพที่ดีเพียงพอ จะทำให้ศัลยแพทย์สามารถทำการผ่าตัดได้อย่างถูกต้อง ร่วมกับมีการตัดสินใจที่แม่นยำ อย่างไรก็ตามในบางแง่มุม ประสิทธิภาพของศัลยแพทย์จำเป็นต้องการการสนับสนุนทางเทคโนโลยีเพื่อผลลัพธ์ด้านความปลอดภัยที่ดีที่สุด ทำให้การผ่าตัดประสบความสำเร็จและบรรลุวัตถุประสงค์ การมองเห็นเป็นข้อจำกัดของมนุษย์ และอาจเป็นอุปสรรคอย่างหนึ่งสำหรับกระบวนการผ่าตัดที่ละเอียดอ่อน หุ่นยนต์ได้กลายเป็นเครื่องมือที่มีประสิทธิภาพอย่างหนึ่ง สำหรับการปรับปรุงความสามารถในการมองเห็น เพื่อความถูกต้อง แม่นยำ การพึ่งพาวิทยาการหุ่นยนต์ในปัจจุบันในศตวรรษที่ 21 ค่อยๆ ปรากฏขึ้น [7] วิทยาการหุ่นยนต์ถูกสร้างขึ้นจากความพยายามที่ล้มเหลวหลายครั้ง ร่วมกับการพัฒนาเซ็นเซอร์ชีวภาพจำนวนมาก สำหรับการผ่าตัดที่ซับซ้อนเกือบทั้งหมดในปัจจุบันนี้ หุ่นยนต์ช่วยผ่าตัดได้เข้ามามีบทบาทสำคัญ และมีรายงานที่หุ่นยนต์สามารถช่วยผ่าตัดได้อย่างประสบความสำเร็จ ดังตัวอย่างเช่นการใช้งานหุ่นยนต์ช่วยผ่าตัดบริเวณฐานกะโหลกผ่านรูจมูกเพื่อเข้าสู่โพรงอากาศสฟีนอยด์ ดังภาพที่ 1 หรือหุ่นยนต์ช่วยผ่าตัดระบบทางเดินปัสสาวะในเด็ก[8], การผ่าตัดเปลี่ยนข้อสะโพก [9], การตรวจจับรูปร่างและการควบคุมสายสวน [10], การผ่าตัดระบบทางเดินปัสสาวะ ต่อมลูกหมาก [11] การผ่าตัดหัวใจหรือการผ่าตัดในช่องอกที่ซับซ้อน เช่นการผ่าตัด mitral annulus [12] และ esophagectomy [13] การผ่าตัดระบบประสาท [14], การผ่าตัดต่อมไทรอยด์ [15] และการทำลายเนื้อเยื่อระบบประสาทที่ผิดปกติ [16] เป็นต้น ภาพที่ 1 แสดงการศึกษาวิจัยการผ่าตัดบริเวณฐานกะโหลกศีรษะผ่านรูจมูกด้วยหุ่นยนต์ช่วยผ่าตัดเพื่อเข้าสู่บริเวณโพรงอากาศสฟีนอยด์ในร่างอาจารย์ใหญ่
ภาพที่ 1 แสดงการศึกษาวิจัยการผ่าตัดบริเวณฐานกะโหลกศีรษะผ่านรูจมูกด้วยหุ่นยนต์ช่วยผ่าตัดเพื่อเข้าสู่บริเวณโพรงอากาศสฟีนอยด์ในร่างอาจารย์ใหญ่
หุ่นยนต์นับเป็นเครื่องมือทางวิศวกรรมที่สำคัญเครื่องมือหนึ่งซึ่งมีวิวัฒนาการ และประวัติความก้าวหน้าอย่างต่อเนื่อง เริ่มจากระบบอัตโนมัติที่มีการบันทึกไว้ตั้งแต่สมัยกรีกโบราณประมาณ 250 ปี ก่อนคริสตกาล เกี่ยวกับนาฬิกาน้ำอัตโนมัติ ที่มีชื่อว่า clepsydra ซึ่งเป็นนาฬิกาที่ไม่ต้องใช้คนช่วยในการปรับเปลี่ยนเหมือนนาฬิกาทรายธรรมดาทั่วไป สำหรับคำศัพท์คำว่าหุ่นยนต์ในภาษาอังกฤษซึ่งเป็นคำที่มาจากภาษาเชค ว่า robota แปลเป็นไทยว่า ผู้รับใช้ และกลายเป็นคำศัพท์ที่ใช้กันมาจนถึงปัจจุบัน ในทางอุตสาหกรรมนั้นมีการนำหุ่นยนต์เข้ามาใช้ในระบบอย่างจริงจังและสามารถช่วยเพิ่มผลผลิต ลดการใช้แรงงานคน ได้อย่างมีประสิทธิภาพ เนื่องจากหุ่นยนต์นั้นมีข้อบ่งชี้สำคัญในการนำมาใช้ด้วยกันสามประการ คือประการที่หนึ่งหุ่นยนต์นั้นสามารถทำงานซ้ำ ๆ ได้ดี สม่ำเสมอ ไม่มีอาการเหนื่อยเมื่อยล้า และเกิดโอกาสเกิดการผิดพลาดน้อย ประการที่สองหุ่นยนต์สามารถทำงานได้ในสภาพแวดล้อมที่เป็นอันตราย มีความเสี่ยงสูงต่อมนุษย์จากปัจจัยกายภาพ เช่น ความร้อน กระแสไฟฟ้า เป็นต้น และประการสุดท้ายหุ่นยนต์สามารถทำงานในสภาพแวดล้อมที่สกปรกเป็นพิษ มีสารพิษหรือสภาพแวดล้อมที่ปนเปื้อนเชื้อโรคที่อาจทำให้เกิดอันตรายต่อมนุษย์ ซึ่งโดยเฉพาะในกรณีสุดท้ายนั้นหุ่นยนต์จึงมีบทบาทอย่างมากในปัจจุบันที่มีการแพร่กระจายและเกิดการติดเชื้อไวรัสโคโรนาอย่างกว้างขวาง การประยุกต์ใช้หุ่นยนต์ในทางการแพทย์จึงเป็นโอกาสสำคัญที่จะช่วยชีวิตผู้ป่วยติดเชื้อ และป้องกันการติดเชื้อต่อบุคลากรทางการแพทย์
หุ่นยนต์ได้กลายเป็นส่วนหนึ่งในชีวิตประจำวันของเราทุกคน มีการประยุกต์ใช้งานหุ่นยนต์มากขึ้น โดยเฉพาะหุ่นยนต์ที่ไม่ได้ใช้งานในภาคอุตสาหกรรม ได้แก่ ยานพาหนะอัตโนมัติ หุ่นยนต์บริการทั่วไป และอากาศยานไร้คนขับ เป็นต้น ในบทความนี้จะกล่าวถึงการประยุกต์ใช้งานหุ่นยนต์การแพทย์ที่ใช้งานได้จริงทางคลินิก เพื่อช่วยผ่าตัดและอำนวยความสะดวกให้กับบุคลากรทางการแพทย์เพื่อลดโอกาสเสี่ยงอันตรายต่อการติดเชื้อในระหว่างปฎิบัติงาน
1.หุ่นยนต์ช่วยผ่าตัดประสาทศัลยศาสตร์
การประยุกต์ใช้หุ่นยนต์ทางการแพทย์เป็นครั้งแรกนั้นมีรายงานการใช้งานหุ่นยนต์ ชื่อ PUMA ในปี พศ.2528 โดยใช้งานหุ่นยนต์ช่วยผ่าตัดสมองร่วมกับเครื่องเอกซเรย์คอมพิวเตอร์ หากสมมุติว่ามีตู้ปลาที่เต็มไปด้วยเจลใส และภายในเจลใสนั้นมีลูกปิงปองสีแดงลอยอยู่กลางตู้ปลา ถ้าคุณพยายามใช้ส้อมจิ้มลงไปผ่านเจลใสโดยเป้าหมายที่ต้องการคือ ลูกปิงปองสีแดง คุณคงทำได้ไม่ยากนัก หากเปลี่ยนจากลูกปิงปองสีแดงเป็น เมล็ดถั่วลิสงที่ลอยอยู่ในเจลใสในตู้ปลา การพยายามใช้ส้อมจิ้มให้ถูกกลางเมล็ดถั่วลิสงในครั้งเดียว อาจมีความยุ่งยาก และ ต้องใช้ความพยายามมากขึ้น และในขณะเดียวกันหากทำให้เจลใสนั้นมีสีทึบขึ้น การพยายามใช้ส้อมจิ้มให้ถูกตรงกลางเป้าหมายคงจะเป็นปัญหาและต้องใช้ความพยายามเพิ่มขึ้นหลายเท่าตัว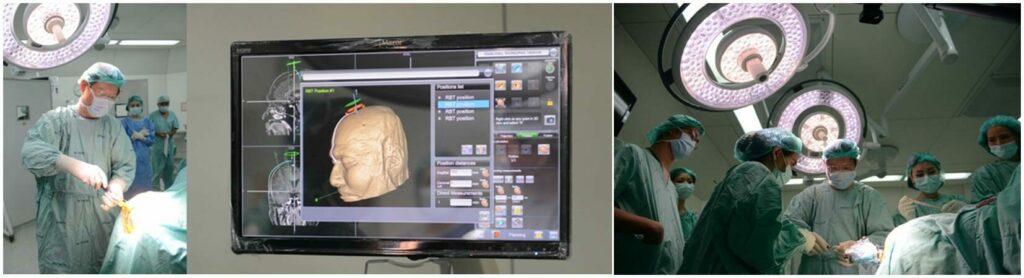 ภาพที่ 2 แสดงการใช้หุ่นยนต์เรเนซองเพื่อช่วยในการผ่าตัดเนื้องอกในสมองขนาดเล็ก
ภาพที่ 2 แสดงการใช้หุ่นยนต์เรเนซองเพื่อช่วยในการผ่าตัดเนื้องอกในสมองขนาดเล็ก
ที่กล่าวมานี้เป็นตัวอย่างให้ท่านได้เข้าใจถึงประเด็นสำคัญ 5 ประเด็นดังนี้ ประเด็นที่หนึ่ง การผ่าตัดสมองก็สามารถเปรียบเทียบได้กับการพยายามใช้ส้อมจิ้มให้ถูกเป้าหมายที่ลอยอยู่ในเจลใสในตู้ปลา หากเปรียบตู้ปลาเป็นกะโหลกศีรษะมนุษย์ และเจลในตู้ปลาเปรียบเสมือนเนื้อสมองของมนุษย์ ในขณะเดียวกันลูกปิงปองสีแดงหรือเมล็ดถั่วลิสงเปรียบเสมือนเนื้อเยื่อเป้าหมาย หรือเนื้องอกในสมองที่ประสาทศัลยแพทย์ต้องใช้ความพยายามเข้าถึง หรือทำการผ่าตัดเอาชิ้นเนื้อออกมา ประเด็นที่สองการผ่าตัดเนื้อเยื่อที่มีขนาดเส้นผ่าศูนย์กลางขนาดเล็กกว่าสามเซนติเมตร จะเป็นปัญหาความยุ่งยากอย่างยิ่งสำหรับประสาทศัลยแพทย์ เนื่องจากการผ่าตัดสมองนั้นอาจทำให้เกิดภาวะแทรกซ้อนและ หากผิดพลาดจากเป้าหมายอาจทำให้เกิดอัมพฤกษ์ หรือ อัมพาตหรืออาจทำให้มีภาวะเลือดออกในสมอง การติดเชื้อตามมาและเสียชีวิตได้ ประเด็นที่สาม ลักษณะการผ่าตัดสมองนี้กระทำเพื่อการวินิจฉัย หรือการตัดชิ้นเนื้อเพื่อการรักษา นอกจากนี้เป็นการผ่าตัดสมองเพื่อการใส่ขั้วไฟฟ้าเข้าไปในตำแหน่งเนื้องอกในสมอง หรือเนื้อเยื่อสำคัญของสมอง ที่มีเส้นผ่าศูนย์กลางของบริเวณที่สนใจนั้นมีขนาดเล็กมาก ได้แก่ การทำลายเนื้องอกในสมอง หรือเพื่อการรักษาภาวะชักเกร็ง หรือรักษาภาวะพาร์กินสัน หรือรักษาภาวะผิดปกติทางจิตบางชนิดที่สามารถรักษาได้ด้วยการผ่าตัด ประเด็นที่สี่ ความแม่นยำ ความถูกต้องและความสามารถในการทำซ้ำได้นั้น เป็นหัวใจสำคัญของการผ่าตัดสมองโดยอาศัยหุ่นยนต์เป็นผู้ช่วย ทั้งนี้ประสาทศัลยแพทย์จะเป็นผู้ทำการวินิจฉัย คิดตัดสินใจบนพื้นฐานของกายวิภาคของสมอง ประกอบกับความก้าวหน้าทางเทคโนโลยีของการถ่ายภาพทางการแพทย์ เช่น CT สมอง หรือ MRI สมอง ทำให้มีจินตนาการหรือภาพสามมิตินี้ เห็นในสมองของประสาทศัลยแพทย์นั้น สามารถเห็นจริงได้ในลักษณะสามมิติ อย่างไรก็ตามจำเป็นต้องอาศัยความสามารถของคอมพิวเตอร์และหุ่นยนต์มาช่วยสนับสนุน ทำให้ภาพของโลกเสมือนจริง (VIRTUAL REALITY) กับโลกความเป็นจริง (REAL WORLD) สามารถซ้อนทับกัน และนำมาใช้ประโยชน์โดยอาศัยความแม่นยำเข้าสู่เป้าหมาย ทั้งนี้หุ่นยนต์จะทำการคำนวณระยะสู่เป้าหมาย แนวทางการเดินทาง และวัดระยะทางต่างๆในเชิงปริมาณ เพื่อให้ประสาทศัลยแพทย์ทราบ และทำการตัดสินใจโดยประสาทศัลยแพทย์ต่อไป โดยประสาทศัลยแพทย์จะสามารถเห็นภาพรวมและวางแผนการเข้าสู่เป้าหมายได้อย่างหลากหลาย บนหลักการของความปลอดภัยอย่างสูงสุดของผู้ป่วยเป็นหลัก ตัวอย่างเช่น ประสาทศัลยศาสตร์แพทย์สามารถวางแผนการเข้าสู่เป้าหมายในสมองผู้ป่วยได้หลากหลายเส้นทาง ขึ้นกับแนวทางที่ถูกสร้างขึ้นโดยหุ่นยนต์ ทั้งนั้นหากมีหลอดเลือดแดง หรือหลอดเลือดดำที่สำคัญขวางอยู่หรือไม่ หรือหุ่นยนต์จะชี้ตำแหน่งในสมองที่สำคัญที่ไม่สามารถดูด้วยตาเปล่าได้ หากทำการผ่าตัดผ่านลงไปอาจทำให้ผู้ป่วยพิการ หรือเสียชีวิตได้ ประเด็นที่ห้า ความสามารถของหุ่นยนต์ช่วยผ่าตัดสมองนี้ทำให้การผ่าตัดในลักษณะบาดเจ็บน้อย หรือ MINIMALLY INVASIVE SURGERY มีความเป็นได้อย่างสูงมาก โดยประสาทศัลยแพทย์จะสามารถทำการผ่าตัดสมองได้โดยไม่จำเป็นต้องเปิดแผลที่ศีรษะให้มีขนาดใหญ่เกินไป ทั้งนี้เพราะหุ่นยนต์ ดังภาพที่ 2 สามารถเข้าถึงเป้าหมายโดยผ่านแผลขนาดเล็กเพียง 3-4 มิลลิเมตร ได้อย่างแม่นยำ และปลอดภัย ลดโอกาสเกิดภาวะแทรกซ้อนของการผ่าตัดสมองลงได้อย่างมาก โดยสรุปที่กล่าวมาทั้งหมดนี้เป็นประเด็นหลักสำคัญของการใช้หุ่นยนต์ช่วยผ่าตัดสมอง ซึ่งเป็นการนำความก้าวหน้าทางวิศวกรรรมชีวการแพทย์เพื่อประโยชน์สูงสุดแก่ผู้ป่วย สามารถลดภาวะแทรกซ้อน อันอาจจะเกิดจากการผ่าตัดสมองได้ โดยเทคโนโลยีหุ่นยนต์ช่วยผ่าตัดสมองนี้ได้เกิดขึ้นจริงแล้วในประเทศไทย และนำมาซึ่งการพัฒนาการผ่าตัดสมองโดยเฉพาะเพื่อการตัดชิ้นเนื้อเพื่อวินิจฉัย หรือการผ่าตัดสมองเพื่อใส่ขั้วไฟฟ้าเข้าไปในสมองสำหรับการรักษาความผิดปกติของสมองบางชนิดต่อไปในอนาคต เพื่อคุณภาพชีวิตที่ดีสำหรับผู้ป่วยที่จำเป็นต้องรับการผ่าตัดสมองนั่นเอง นอกจากนี้ยังสามารถใช้หุ่นยนต์ช่วยในการใส่สกรูเข้าไปในกระดูกสันหลังได้อย่างแม่นยำอีกด้วย ดังภาพที่ 3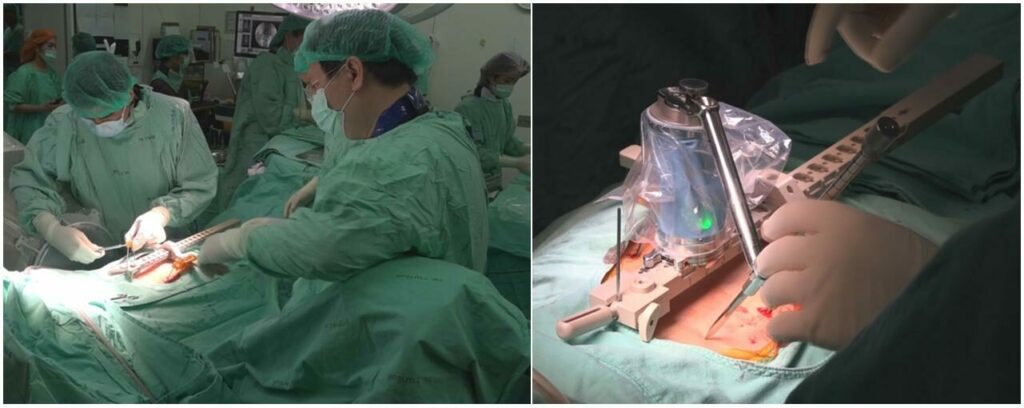 ภาพที่ 3 แสดงการใช้หุ่นยนต์ช่วยผ่าตัดกระดูกสันหลัง
ภาพที่ 3 แสดงการใช้หุ่นยนต์ช่วยผ่าตัดกระดูกสันหลัง
- หุ่นยนต์บริการ
นอกจากนี้ยังมีหุ่นยนต์อีกประเภทหนึ่งที่ไม่ได้ใช้ในงานอุตสาหกรรมต่างๆ เช่น หุ่นยนต์ที่ใช้ในพื้นที่อันตราย ดังเช่นในสภาวการณ์ที่เชื้อไวรัสกำลังแพร่ระบาด ทำให้บุคลากรทางการแพทย์มีโอกาสเสี่ยงที่จะติดเชื้อ หุ่นยนต์บริการระบบกึ่งอัตโนมัติดังภาพที่ 4 ที่สามารถเคลื่อนที่ไปในบริเวณที่มีผู้ป่วยติดเชื้ออยู่นั้นจะสามารถช่วยแบ่งเบาภาระ ลดโอกาสการติดเชื้อ ลดการใช้อุปกรณ์สิ้นเปลืองต่างๆ
ภาพที่ 4 แสดงหุ่นยนต์บริการที่ถูกสร้างขึ้นเพื่อช่วยงานในสภาวการณ์ที่เชื้อไวรัสโควิด 19 ระบาด
หลักการของหุ่นยนต์บริการนั้นประกอบด้วยประการแรก ขนาดของพื้นที่ สภาพแวดล้อมที่หุ่นยนต์จะเข้าไปทำงาน ช่องทางการเคลื่อนที่ การหมุนเลี้ยว ประการที่สองคือวัตถุประสงค์การใช้งาน ลักษณะของวัสดุ อุปกรณ์ที่หุ่นยนต์ต้องทำการขนส่ง ปริมาตรบรรจุหรือบรรทุก และประการที่สามคือระบบความปลอดภัยในระหว่างที่หุ่นยนต์กำลังทำงาน ซึ่งจะต้องไม่ทำให้เกิดอันตรายต่อมนุษย์ที่อยู่ร่วมด้วยหรือกำลังทำงานร่วมด้วย ประการที่สี่ความสะดวกในการใช้งานหุ่นยนต์ ให้สามารถตอบโจทย์ความต้องการของผู้ใช้ได้ง่าย สะดวก ไม่มีขั้นตอนที่ยุ่งยากในการใช้งาน ประการสุดท้ายนั้นหุ่นยนต์ต้องสามารถเป็นตัวกลางในการติดต่อสื่อสารระหว่างผู้ควบคุมกับผู้ที่อยู่ปลายทาง ซึ่งสามารถใช้งานผ่านระบบอินเตอร์เนต์ได้อย่างราบรื่น และตอบสนองตามเวลาจริง
การดูแลรักษาผู้ป่วยโรคติดเชื้อที่มีการแพร่ระบาดทางอากาศเป็นสิ่งที่แพทย์ พยาบาล บุคลากรทางการแพทย์ที่เกี่ยวข้อง จะต้องใช้ความระมัดระวังในการทำงานเป็นอย่างสูง อีกทั้งมีโอกาสเสี่ยงติดเชื้อที่ค่อนข้างสูง แม้การมีเครื่องมือและอุปกรณ์ป้องกันตัวเองต่างๆ อย่างครบครัน ก็ไม่สามารถรับประกันการป้องกันได้ 100 เปอร์เซ็นต์เต็ม และสิ่งสำคัญที่สุดอีกอย่างหนึ่งที่โรงพยาบาลควรจะใส่ใจดูแลคือสภาพจิตใจของบุคลากรทางการแพทย์ ประกอบกับสถานการณ์การแพร่ระบาดของโรค COVID-19 ในปัจจุบัน (เดือนมีนาคม 2563) องค์กรอนามัยโลก (WHO) ได้ทำการศึกษาและยืนยันข้อมูลว่าไวรัส Corona สามารถแพร่กระจายทางอากาศได้ (Airborne) ทำให้การทำงานของบุคลากรทางการแพทย์มีความยุ่งยากขึ้นไปอีกหลายระดับ การนำเทคโนโลยีและนวัตกรรมต่างๆ ที่มีอยู่แล้ว มาประยุกต์ใช้ในทางการแพทย์ เพื่อช่วยสนับสนุนการทำงานของบุคลากรทางการแพทย์ในการเผชิญหน้ากับโรคระบาด COVID-19 ถือว่าเป็นตัวเลือกที่จะมีประโยชน์มาก เทคโนโลยีและนวัตกรรมที่มีอยู่ในปัจจุบันนั้นสามารถนำมาสนับสนุนการทำงานทางการแพทย์ได้ในหลากหลายช่องทาง สำหรับโครงการนี้ทางทีมงานนำเสนอการนำเอาหุ่นยนต์มาช่วยในการดูแลรักษาผู้ป่วยติดเชื้อที่ยังไม่แสดงอาการ หุ่นยนต์จะทำหน้าที่ในการเข้าสู่พื้นที่ติดเชื้อแทนบุคลากรทางการแพทย์ สามารถสื่อสารกับผู้ป่วยและขนส่งสิ่งของจำเป็นได้ ช่วยลดความเสี่ยงในการทำงานของบุคลากรทางการแพทย์และลดการใช้ทรัพยากรที่มีอยู่จำกัด เช่น หน้ากาก N95 และชุด PPE เป็นต้น โดยในสถานการณ์การระบาดของโรค COVID-19 ที่กระจายไปทั่วโลกนั้นมีการนำเอาหุ่นยนต์มาช่วยการทำงานของแพทย์ ด้วยหลักการดังกล่าวข้างต้นทีมงานจากคณะแพทยศาสตร์โรงพยาบาลรามาธิบดีได้พัฒนาหุ่นยนต์ โดยใช้สถานีบังคับเพื่อช่วยบุคลากรทางการแพทย์ให้สามารถเข้าถึงผู้ป่วยติดเชื้อที่ไม่แสดงอาการ โดยหุ่นยนต์จะทำหน้าที่แทนแพทย์และพยาบาลในการเข้าสู่พื้นที่ติดเชื้อ และหุ่นยนต์จะสามารถเคลื่อนที่ไปยังสถานีฆ่าเชื้อด้วยรังสี UVC เพื่อความปลอดภัย การเคลื่อนที่ไปมาระหว่างพื้นที่ปลอดเชื้อและพื้นที่ติดเชื้อนั้น หุ่นยนต์ได้ถูกออกแบบโดยประกอบด้วย 3 ส่วน คือ หุ่นยนต์ สถานีบังคับ และสถานีฆ่าเชื้อ รูปแบบการใช้งานคือ ผู้ใช้งานสามารถบังคับการเคลื่อนที่ของหุ่นยนต์ได้จากระยะไกล ผ่านระบบอินเตอร์เนต ซึ่งการเคลื่อนที่ของหุ่นยนต์ทำได้ 2 ลักษณะ คือแบบกึ่งอัตโนมัติ ซึ่งหุ่นยนต์จะเดินตามเส้นสีดำที่แปะอยู่บนพื้น ทำให้มีเส้นทางการเดินที่ชัดเจนไม่ก่อให้เกิดความสับสนในการใช้งานร่วมกับบุคลากรทางการแพทย์ ผู้ใช้งานสามารถเลือกเป้าหมายที่ต้องการได้ จากนั้นหุ่นยนต์จะวิ่งไปตามเส้น ซึ่งระหว่างการวิ่งตามเส้น ผู้ใช้งานสามารถบังคับหุ่นยนต์ด้วยรีโมทควบคุมได้ตลอดเวลา และแบบควบคุมด้วยมนุษย์ ซึ่งผู้ใช้งานสามารถบังคับการเคลื่อนที่ของหุ่นยนต์ได้จากระยะไกลที่สถานีบังคับการใช้งานของหุ่นยนต์ ตัวหุ่นยนต์และสถานีบังคับจะถูกติดตั้งไว้ในที่ตึกผู้ป่วย (Ward) โดยตัวสถานีบังคับจะติดตั้งในพื้นที่ปลอดเชื้อ สถานีฆ่าเชื้อและตัวหุ่นยนต์จะอยู่ในพื้นที่กันชนระหว่างพื้นที่ติดเชื้อและพื้นที่ปลอดเชื้อ เส้นทางการเดินของหุ่นยนต์จะถูกบังคับด้วยเส้นสีดำบนพื้นที่ถูกติดตั้งไว้แล้วให้หุ่นยนต์สามารถวิ่งไปตามห้องผู้ป่วยหรือเตียงผู้ป่วยได้ ผ่านการบังคับจากผู้ใช้งานที่สถานีบังคับหุ่นยนต์มีขนาดปานกลาง รูปทรงสี่เหลี่ยม ขนาดความกว้าง 50 ซม. ยาว 50 ซม. สูง 85 ซม. ตัวหุ่นยนต์ประกอบด้วย 2 ส่วน คือ ส่วนขับเคลื่อน และ ส่วนการทำงานขนส่งและการติดต่อสื่อสารทางไกล ส่วนขับเคลื่อนประกอบด้วยมอเตอร์ไฟฟ้าและล้อขับเคลื่อนจำนวน 2 ชุด ใช้ไฟจากแบตเตอร์รี่ขนาด 24 V 12 Ah สามารถทำงานต่อเนื่องได้ 6 ชั่วโมงหรือระยะทาง 20 กิโลเมตร และรองรับน้ำหนักการใช้งานได้มากกว่า 80 กิโลกรัม ส่วนการขนส่งและส่วนติดต่อสื่อสารทางไกลเป็นส่วนเสริมที่นำมาต่อลงบนส่วนขับเคลื่อนเพื่อการใช้งาน สำหรับส่วนขนส่งจะแบ่งเป็นช่องสำหรับการใส่ของ ที่แต่ละช่องมีการปิดผนึกป้องกันการติดเชื้อในระหว่างการเข้าพื้นที่ปนเปื้อน สำหรับการติดต่อทางไกลตัวหุ่นยนต์จะมีกล้องวิดีโอและหน้าจอไว้สำหรับการสื่อสารทางไกล
สรุป
การประยุกต์ใช้งานหุ่นยนต์เพื่อสนับสนุนการทำงานของบุคลากรทางการแพทย์นับเป็นความก้าวหน้าสำคัญที่เกิดจากการผสมผสานกันระหว่างวิทยาศาสตร์การแพทย์กับความก้าวหน้าทางวิศวกรรม ทำให้เกิดประโยชน์มากมายต่อบุคลากรทางการแพทย์ เพิ่มความแม่นยำ ลดโอกาสผิดพลาดที่อาจเกิดได้จากมนุษย์ ลดโอกาสการติดเชื้อ และที่สำคัญลดการใช้ทรัพยากรที่สิ้นเปลืองในสถานการณ์ที่มีข้อจำกัดต่างๆ หุ่นยนต์สามารถทำงานสนับสนุนแพทย์ พยาบาลและบุคลากรทุกคน โดยเฉพาะความปลอดภัย และประโยชน์ที่เกิดกับผู้ป่วยโดยตรง
References
- Carlsson LMS, Sjöholm K, Jacobson P, Andersson-Assarsson JC, Svensson P-A, Taube M, et al. Life expectancy after bariatric surgery in the Swedish obese subjects study. N Engl J Med. 2020;383(16):1535–43. [PubMed][PubMedCentral]
- Cutler DM, Chernow M, Ghosh K, Landrum MB. Understanding the improvement in disability free life expectancy in the U.S. elderly population. In: Insights in the economics of aging. Chicago: University of Chicago Press and The National Bureau of Economic Research; 2017.
- Mason MT. Creation myths: the beginnings of robotics research. IEEE Robot Automat Mag. 2012;19(2):72–7.
- Trévillot V, Garrel R, Dombre E, Poignet P, Sobral R, Crampette L. Robotic endoscopic sinus and skull base surgery: review of the literature and future prospects. Eur Ann Otorhinolaryngol Head Neck Dis. 2013;130(4):201–7. [PubMed]
- Chumnanvej S, Chalongwongse S, Pillai BM, Suthakorn J. Pathway and workspace study of Endonasal Endoscopic Transsphenoidal (EET) approach in 80 cadavers. Int J Surg Open. 2019;16:22–8.
- Chumnanvej S, Madhavan Pillai B, Suthakorn J. Surgical robotic technology for developing an endonasal endoscopic transsphenoidal surgery (EETS) robotic system. The Open Neurol J. 2019;13:96–106.
- Chumnanvej S, Pattamarakha D, Sudsang T, Suthakorn J. Anatomical workspace study of endonasal endoscopic transsphenoidal approach. Open Med (Wars). 2019; 14:537–44.
- Chumnanvej S, Pillai BM, Chalongwongse S, Suthakorn J. Endonasal endoscopic
transsphenoidal approach robot prototype: a cadaveric trial. Asian J Surg. 2020;44(1):345–51. [PubMed]